Radary i radiolokacja
1842–45 Austriacki naukowiec Christian Doppler publikuje teorię zmiany częstotliwości fali, wywołanej ruchem źródła falowego. Zjawisko to znane jest jako efekt Dopplera. W 1845 roku dopplerowska teoria została potwierdzona doświadczalnie przez holenderskiego fizyka Buys Ballota.
1886 Heinrich Hertz (1) opisuje teoretycznie istnienie fal elektromagnetycznych, które mogą być wykorzystane do przesyłania informacji. Hertz używał urządzenia, które co do zasady działania było podobne do współczesnego radaru impulsowego. Wykazał również, że fale elektromagnetyczne mogą być odbijane przez metalowe przedmioty oraz ulegają refrakcji podczas przejścia przez wykonany z dielektryka pryzmat.
1904 Christian Hülsmeyer, niemiecki wynalazca, konstruuje pierwszy radar, zwany wówczas telemobiloskopem (2) lub telemobilofonem, do wykrywania obiektów na wodzie. Urządzenie to działało na zasadzie emisji fal elektromagnetycznych i odbicia ich od obiektów. We wczesnych latach XX wieku zbudował on urządzenie, które dzisiaj można nazwać monostatycznym radarem impulsowym, a było udoskonaloną wersją urządzenia Hertza (termin monostatyczny oznacza, że nadajnik i odbiornik radaru umieszczone są w jednym urządzeniu). Wynalazek Hülsmeyera nie spotkał się jednak z zainteresowaniem i wkrótce o nim zapomniano.

lata 20. XX wieku Naukowcy zaczynają eksperymentować z wykorzystaniem efektu Dopplera w radarze. W 1922 roku dwóch Amerykanów, Hoyt Taylor i Leo C. Young, przypadkowo zaobserwowało fluktuacje odbieranego sygnału, gdy statek przepływał między odbiornikiem i nadajnikiem umieszczonymi na przeciwnych brzegach rzeki. Dzisiaj urządzenie takie nazwalibyśmy radarem bistatycznym o fali ciągłej (termin bistatyczny oznacza, że nadajnik i odbiornik radaru umieszczone są w różnych miejscach, odległych nawet o kilkadziesiąt kilometrów). Pierwsze próby wykrycia ruchu obiektów przy użyciu radaru dopplerowskiego zostały przeprowadzone w 1927 roku.
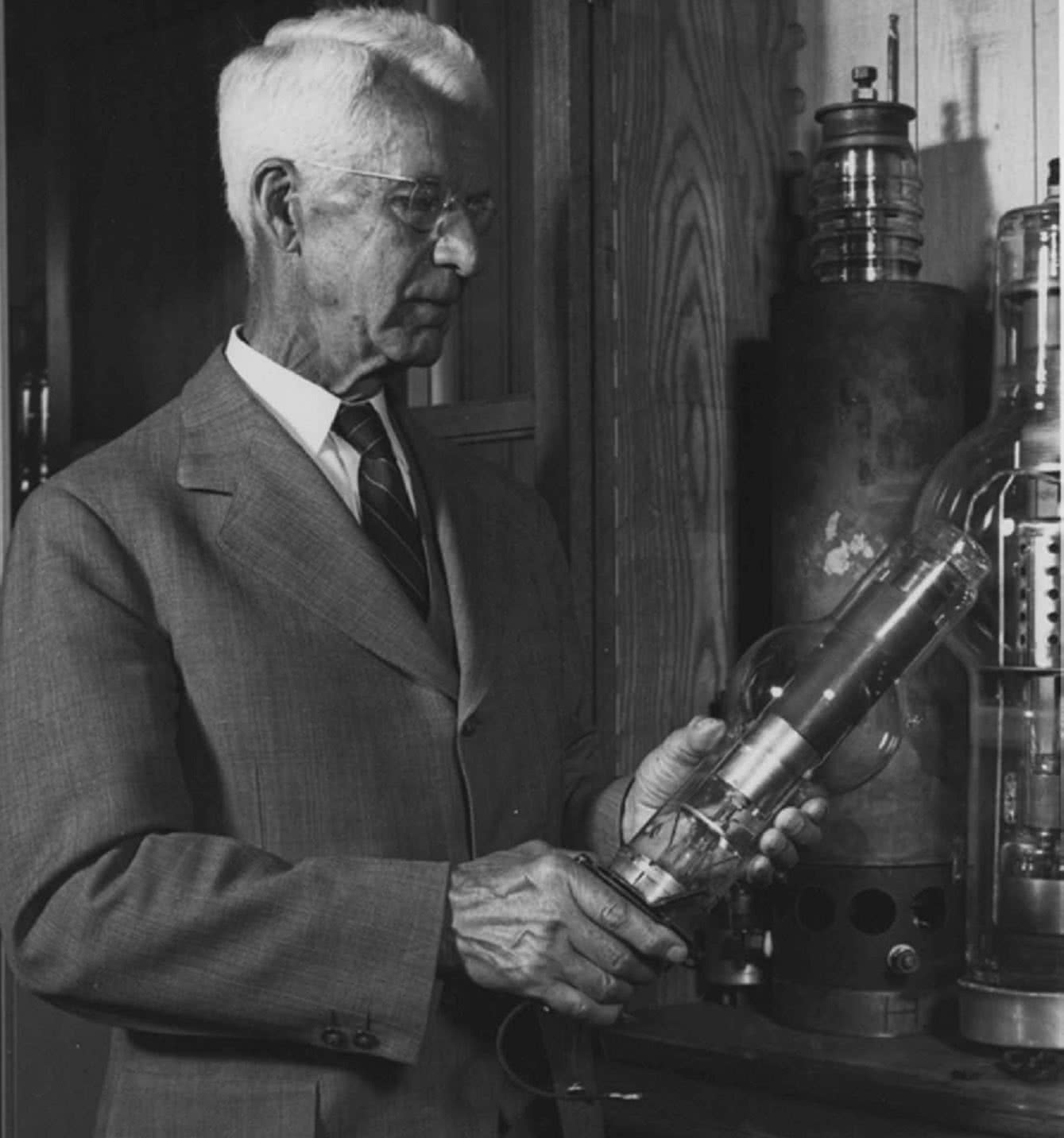
1921 Amerykański fizyk Albert Wallace Hull (3) wynajduje magnetron, wydajną lampę nadawczą, która przetwarza wejściową energię prądu stałego na energię elektryczną wysokiej częstotliwości. Przetwarzanie energii odbywa się w specjalnie ukształtowanej komorze anodowej umieszczonej w silnym polu magnetycznym.
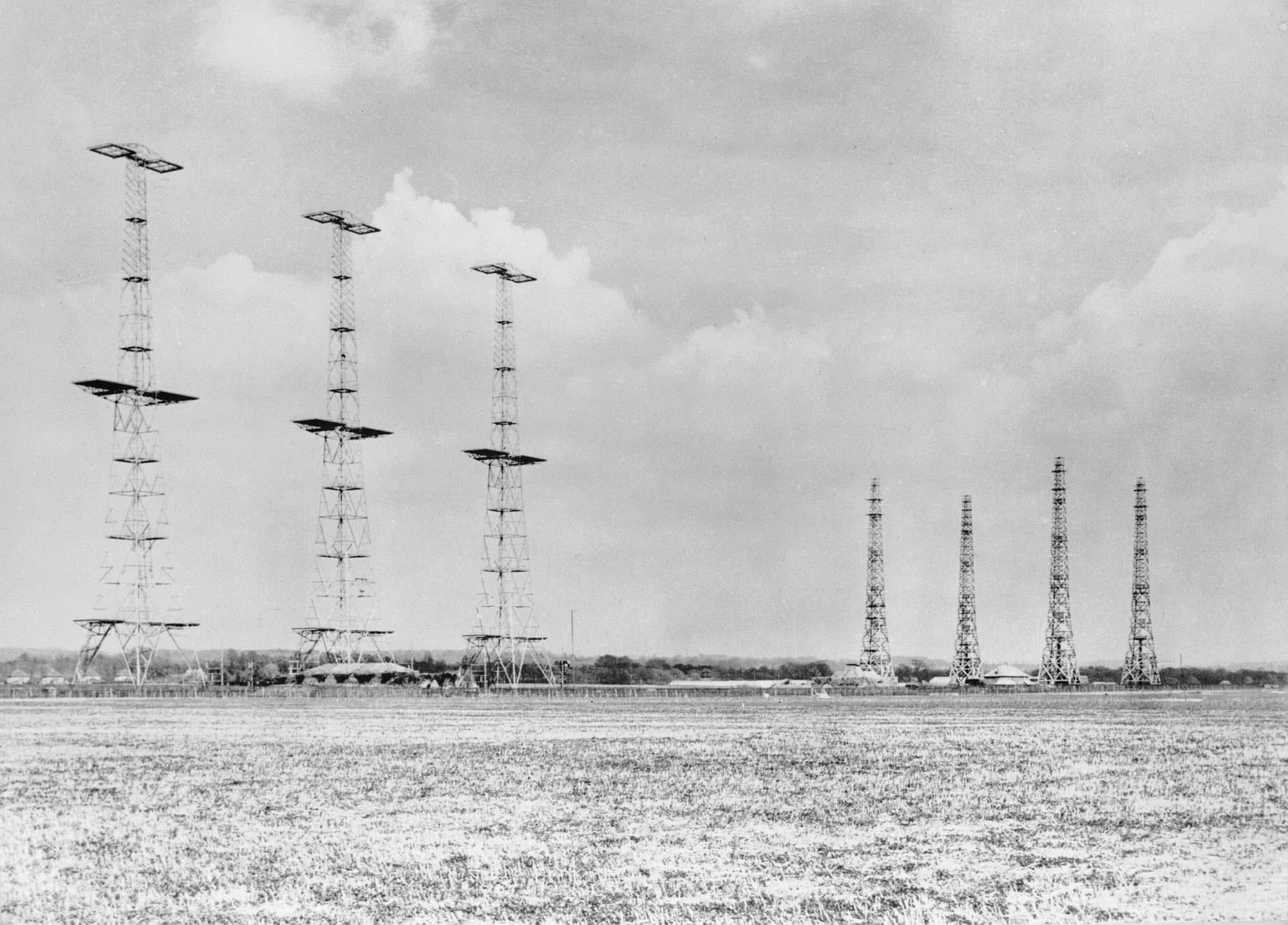
1935 Brytyjczyk Robert Watson-Watt projektuje pierwszy radar lotniczy o nazwie Chain Home. Był to system, który wykorzystywał emisję fal radiowych i ich odbicie od samolotów, aby określić ich położenie. Zademonstrował on Brytyjskiemu Komitetowi Obrony Powietrznej aparat, za pomocą którego wykrył z odległości 50 kilometrów nadlatujący samolot. W tym samym roku przystąpiono w Wielkiej Brytanii do budowy nadbrzeżnej sieci eksperymentalnych radarów (4), składającej się z pięciu stacji pracujących na falach o długości 25 metrów. Sieć ta pozwalała wykrywać nadlatujące samoloty z odległości 90 kilometrów.
W 1937 roku zbudowano w Anglii radar znacznie doskonalszy, pracujący na falach 1,5 metra, przy czym urządzenie miało takie wymiary, że mogło być umieszczane na samolotach. W przededniu II wojny światowej Wielka Brytania miała już sprawną sieć stacji radarowych, pracujących na falach o długości 12 metrów, służących do zdalnego ostrzegania, i sieć stacji pracujących na falach o długości 1,5 metra służących do wykrywania nisko lecących samolotów. Brytyjskie systemy radarowe odegrały kluczową rolę w bitwie Anglię, umożliwiając wykrywanie nadlatujących samolotów niemieckich.
1936–37 Według różnych źródeł wynalazcami ważnego w technice radarowej klistronu było dwóch techników z General Electric, George F. Metcalf i William C. Hahn, albo też bracia Russell i Sigurd Varianowie z Uniwersytetu Stanforda. Klistron to lampa mikrofalowa z modulacją prędkości elektronów, ważny element stacji radiolokacyj-nych spełniający funkcję wzmacniacza lub generatora przebiegów mikrofalowych częstotliwościach od setek megaherców w górę). Składa się z katody wysyłającej elektrony, zespołu elektrod ogniskujących elektrony w wąską wiązkę, anody przyśpieszającej oraz przynajmniej dwóch rezonatorów i kolektora. Był pierwszym praktycznym źródłem fal radiowych o dużej mocy w zakresie mikrofalowym. Przed jego wynalezieniem źródłami były lampa Barkhausena–Kurza i magnetron z dzieloną anodą, ograniczone do małych mocy.
1939 Zastosowanie magnetronu w radiolokacji pozwoliło na znaczne zredukowanie rozmiarów radarów, zwłaszcza anten, co umożliwiało instalowanie ich na pokładach samolotów. Dwóch inżynierów z uniwersytetu w Birmingham, John Randall i Henry Boot, buduje niewielki, ale mocny radar na bazie magnetronu wielownękowego, w który następnie zaczęto wyposażać samoloty B-17. Pozwoliło to później odnajdywać i zwalczać niemieckie łodzie podwodne, w nocy i we mgle.
1940 Amerykańska firma RCA opracowuje pierwszy radar dopplerowski, który potrafi wykrywać ruch obiektów na powierzchni Ziemi.

w stanie Connecticut
1947–49 W1947 roku w Glastonbury w amerykańskim stanie Connecticut rozpoczęto testowanie radaru do pomiaru prędkości przejeżdżających pojazdów (5). W lutym 1949 roku pojawia się pierwszy na świecie punkt pomiaru prędkości. Oficerowie pracowali w parach - jeden obserwował system radarowy, zbierając wizualne dowody przekroczenia prędkości przez przejeżdżające samochody i wysyłał sygnały radiowe do drugiego funkcjonariusza, podając mu numer rejestracyjny pojazdu, drugi funkcjonariusz czekał na samochód, zatrzymywał kierowcę i wystawiał mu mandat.
1947 Ideę radaru impulsowego z liniową modulacją częstotliwości opracowuje i patentuje Sidney Darlington, amerykański inżynier i wynalazca pracujący w Bell Laboratories.
lata 50. XX wieku Prace rozwojowe nad radarem pozahoryzontalnym (OTH), którego pierwszą koncepcję przedstawił amerykański uczony Robert Morris Page. Prowadzone były w USA, w ZSRR (6), a także w Czechosłowacji.

lata 50.–60. XX wieku Początki wykorzystania radaru do celów cywilnych, takich jak kontrola ruchu lotniczego, meteorologia, badania obiektów kosmicznych, przemysł i medycyna.

1951–78 Patent na radar z syntetyczną aperturą (SAR) John Wiley złożył na początku lat 50. Kierował zespołem w Goodyear Aircraft Corporation, pracującym nad techniką pozwalającą rozszerzyć i poprawić rozdzielczość obrazów generowanych przez radar. W radarze z syntetyczną aperturą (SAR) zwykłej wielkości sygnał z anteny, mocowanej np. w samolocie, jest przetwarzany w złożonym systemie wykorzystującym m.in. matematyczne przekształcenie Fouriera.
Impulsy są wypromieniowywane w poprzecznym paśmie na teren. Powrót sygnałów jest rozłożony w czasie, ze względu na odbicia od elementów znajdujących się w różnych odległościach. Amplituda i faza powrotów są łączone przez procesor sygnału w celu generacji obrazu. W 1974 r. po raz pierwszy zaproponowano koncepcję interferometrii SAR do obserwacji Ziemi. W 1978 roku, wystrzelono na orbitę pierwszy kosmiczny radar typu SAR do obserwacji Ziemi, na pokładzie satelity SEASAT (7).
1957 W USA rozpoczynają się prace nad projektem sieci radarów meteorologicznych, zalążkiem Narodowej Sieci Radarów Meteorologicznych. W latach 50. naukowcy rozpoczęli prace nad wykorzystaniem radaru dopplerowskiego w meteorologii, do badania ruchu chmur, opadów i innych zjawisk atmosferycznych. W kolejnych latach radar tego typu zaczął być wykorzystywany w kontrolowaniu ruchu lotniczego, a także w badaniach geologicznych i oceanograficznych.
1967 W Wielkiej Brytanii powstaje pierwszy niewielki radar przenośny, który mógł być łatwo przenoszony przez policjantów na drodze.
1975 W Japonii opracowany zostaje pierwszy radar meteorologiczny, który wykorzystywał falę 5 cm. Był to radar z reflektorem obracającym się wokół anteny.
lata 80. XX wieku Wprowadzanie, przede wszystkim w zastosowaniach militarnych, radaru pasywnego, który wykorzystuje fale elektromagnetyczne generowane przez inne źródła, takie jak telewizory i radia, do wykrywania celów. Ten rodzaj radaru stał się ważnym narzędziem wywiadowczym, ponieważ umożliwia wykrycie celów, które nie emitują własnych sygnałów (8).

przełom lat 80. i 90. Pojawia się radar z fazą skanowania (phased array), który umożliwia szybkie i skuteczne skanowanie dużych obszarów. Ten rodzaj radaru stał się bardzo ważnym narzędziem w obronie powietrznej, umożliwiając szybkie wykrycie i śledzenie lotów nieprzyjacielskich samolotów. Jego następcą jest radar z aktywną fazą skanowania, umożliwiający jeszcze szybsze i bardziej precyzyjne skanowanie, a także wykrywanie celów, które poruszają się z dużą prędkością (9).

z domniemanymi możliwościami wykrywania samolotów stealth
lata 90. XX wieku Pojawiają się pierwsze radary typu stealth, zdolne do wykrywania celów o niskiej sygnaturze radarowej. Celem było zwalczanie samolotów niewykrywalnych przez konwencjonalne radary.
lata 2000 i później W latach 2000–2010 nastąpił znaczny postęp w technologii mikrofalowej i fotonowej, pozwalający na rozwój radarów o większej czułości i zdolności do detekcji celów. Wprowadzano również nowe techniki przetwarzania sygnału radarowego, w tym systemy cyfrowe i sztuczną inteligencję. Pojawił się radar z bardzo krótką falą (VHF), który umożliwia wykrywanie celów o niskiej wysokości, takich jak drony, i wykrywanie samolotów stealth, a także wykrywanie celów na dużych odległościach.
W 2004 roku naukowcy z Caltech zademonstrowali pierwszy zintegrowany, oparty na krzemie odbiornik dla szyku fazowanego anten (phased array) na częstotliwości 24 GHz z ośmioma elementami. Następnie w 2005 r. zademonstrowali nadajnik CMOS 24 GHz dla układu phased array. W 2007 roku badacze z Agencji Zaawansowanych Projektów Badawczych w Obszarze Obronności (DARPA) ogłosili powstanie szesnastoelementowej anteny ra-daru w szyku fazowanym, która również była zintegrowana ze wszystkimi niezbędnymi obwodami na jednym chipie krzemowym i pracowała na częstotliwości 30–50 GHz.
od 2016 do dziś Start i rozwój techniki radaru kwantowego. W USA projekty radarów kwantowych finansuje DARPA. W 2016 roku Chiński Uniwersytet Nauk i Technologii opracował prototyp radaru kwantowego ze zdolnością wykrywania celów o niskiej sygnaturze radarowej na odległości do 100 metrów. W 2019 roku naukowcy z brytyjskiego uniwersytetu w Glasgow ogłosili, że opracowali radar kwantowy, który jest w stanie wykryć cel w odległości do 20 metrów. W 2020 roku zespół z australijskiego Uniwersytetu Monash ogłosił, że opracował radar kwantowy, który jest w stanie wykryć obiekty o rozmiarze od 10 do 50 centymetrów na odległości od metrów do kilku kilometrów. Radary kwantowe są jednak nadal w stosunkowo wczesnej fazie eksperymentalnej.
Klasyfikacja radarów
Radar to skrót angielskiego terminu Radio Detection and Ranging, co można przetłumaczyć na Radiowe Wykrywanie i Pomiar Odległości. Radar wykorzystuje fale elektromagnetyczne do wykrywania obiektów oraz pomiaru ich odległości, prędkości i innych parametrów. Radary można klasyfikować na wiele sposobów, według rozlicznych kryteriów.
Pod względem zastosowania można je podzielić na:
- Radary meteorologiczne - służące do monitorowania pogody, w tym wykrywania opadów, burz i tornad, w których analiza odbić, przystosowanego do obserwacji obiektów meteorologicznych radaru pozwala ustalić prognozę pogody, a także strukturę burz;
- Radary nawigacyjne - stosowane w lotnictwie, do nawigacji statków i w samochodach, umożliwiające dokładne
określenie położenia i prędkości; - Radary wojskowe - służące do wykrywania i identyfikacji celów, w tym samolotów, okrętów, pojazdów i ludzi;
- Radary kosmiczne - służące do badania planet, gwiazd i innych obiektów kosmicznych;
- Radary samochodowe, zdalne prędkościomierze, fotoradary - zbiór rozwiązań stosowanych na drogach, zarówno przez kierowców, jak i służby bezpieczeństwa ruchu do określania prędkości, odległości lub innych parametrów w ruchu samochodowym;
- Radary przemysłowe - stosowane w przemyśle, np. w kontrolowaniu jakości produktów, dozowaniu substancji lub pomiarze poziomu cieczy;
- Radary medyczne - używane w medycynie, np. do obrazowania narządów wewnętrznych lub do pomiaru prędkości krwi w naczyniach;
- Radary do zastosowań specjalnych - używane do różnych celów, takich jak wykrywanie min, monitorowanie ruchu pojazdów czy wykrywanie obiektów na dnie morza.
Gdy weźmiemy pod uwagę zasadę fizyczną, spełniane funkcje i techniczne szczegóły konstrukcji, to rysuje się taka klasyfikacja radarów:
- Radary pasywne - działające na zasadzie odbicia fal elektromagnetycznych od obiektów, które nie generują własnego sygnału radarowego, np. statków powietrznych;
- Radary aktywne - generujące własny sygnał radarowy, który jest odbijany od obiektów, umożliwiając ich wykrycie;
- Radary kierunkowe - umożliwiające określenie kierunku, z którego nadchodzi sygnał;
- Radary z syntetyczną aperturą - wykorzystujące matematyczne algorytmy do poprawy rozdzielczości obrazów;
- Radary z fazową aperturą - wykorzystujące anteny o skomplikowanej strukturze (w tzw. szyku fazowym anten), które pozwalają na uzyskanie bardzo dobrej jakości obrazów.
Jeśli zechcemy podzielić radary według sposobu emisji sygnału, to najogólniejszy podział wygląda tak:
- Radary z falą ciągłą - emitują transmitowany sygnał w sposób ciągły, a sygnał echa jest stale odbierany i przetwarzany - ich odmianą są radary dopplerowskie;
- Radary impulsowe - urządzenia radarowe, które emitują krótkie, silne impulsy i odbierają echa pomiędzy nimi (podczas tzw. przerwy spoczynkowej).
M.U.