Gerris USV - hydrodron od podstaw!

Zaczęło się od dostosowania…
Pierwszy raz zetknęliśmy się z podobnym zagadnieniem, kiedy kilka lat temu zadano nam pytanie o możliwości uzbrojenia w napędy i dostosowania do sterowania radiowego ciąganej batymetrycznej (czyli służącej do pomiarów głębokości akwenów) platformy pomiarowej.


Modelarskie wyzwanie dotyczyło zaprojektowania i wykonania napędów do gotowych, fabrycznych pływaków z PE wykonanych w technologii rozciągania i rozdmuchu (RSBM - podobnie jak butelki PET). Po przeanalizowaniu warunków pracy i dostępnych opcji, wybraliśmy dość nietypowe rozwiązanie - i nie ingerując w kadłuby poniżej linii wodnej, zainstalowaliśmy akwarystyczne cyrkulatory-falowniki jako napędy z dodaną możliwością obrotu o 360° i podnoszenia (np. w przypadku natrafienia na przeszkodę lub w czasie transportu). Rozwiązanie to, dodatkowo wsparte osobnym systemem sterowania i zasilania, pozwoliło na kontrolę i powrót do operatora, nawet w przypadku awarii jednej z sekcji (prawej lub lewej). Rozwiązania sprawdziły się na tyle, że katamaran pracuje do dziś.


Pewną niedogodnością okazała się jednak wrażliwość napędów na zanieczyszczenia wody. Wprawdzie po awaryjnym dopłynięciu do brzegu można dość szybko usunąć piasek z wirnika, ale trzeba uważać na ten aspekt przy wodowaniu i pływaniu blisko dna. Ponieważ mimo wszystko wiąże się to z wydłużeniem realizacji pomiaru, a i w międzyczasie rozszerzył się obszar zastosowania hydrodrona (na rzeki), nasz znajomy wyraził zainteresowanie nową, opracowaną specjalnie w tym celu, wersją rozwojową platformy. Podjęliśmy i to wyzwanie - wpisujące się w dydaktyczny profil naszych pracowni i dające jednocześnie możliwość sprawdzenia opracowanych rozwiązań w praktyce!

• Długość/szerokość/wysokość 1200/1000/320 mm
• Konstrukcja: kompozyt epoksydowo-szklany, aluminiowa rama łącząca
• Wyporność: 30 kg, w tym ładowność: nie mniej niż 15 kg
• Napęd: 4 silniki BLDC (chłodzone wodą)
• Napięcie zasilania: 9,0 V…12,6 V
• Prędkość: operacyjna: 1 m/s; maksymalna: 2 m/s
• Czas pracy na jednym ładowaniu: do 8 h (przy dwóch akumulatorach po 70 Ah)
• Strona projektu: https://www.facebook.com/GerrisUSV/
Nauki ciąg dalszy - czyli założenia do nowego projektu
Wytyczne, jakie postawiliśmy sobie przy opracowywaniu własnej wersji, były następujące:
- dwukadłubowiec (podobnie jak w pierwszej wersji, gwarantujący największą stabilność, niezbędną do uzyskania dokładnych pomiarów echosondą);
- zdublowane układy napędowe, zasilania i sterowania;
- wyporność umożliwiająca montaż urządzeń pokładowych o masie min. 15 kg;
- możliwość łatwego demontażu do transportu i dodatkowe ułatwienia transportowe;
- wymiary umożliwiające transport w typowym aucie osobowym nawet w stanie zmontowanym;
- zabezpieczone przed uszkodzeniem i zanieczyszczeniem, zdublowane napędy w obrysie kadłubów;
- uniwersalność platformy (możliwość użycia w innych zastosowaniach);
- możliwość rozbudowy do wersji autonomicznej.

Projekt kontra technologia, czyli uczenie się na błędach (albo do trzech razy sztuka)
Najpierw był, rzecz jasna, research - sporo czasu spędzonego na przeczesywaniu Internetu pod kątem podobnych konstrukcji, rozwiązań i technologii. Inspirowały nas tak hydrodrony najróżniejszego zastosowania, jak i modułowe kajaki i małe łodzie osobowe do samodzielnego montażu. Wśród pierwszych znaleźliśmy potwierdzenie wartości dwukadłubowego układu jednostki (ale praktycznie w każdym śruby napędowe znajdowały się pod dnem - większość była przeznaczona do pracy w czystszych wodach). Modułowe rozwiązania produkowanych przemysłowo kajaków zachęciły nas natomiast do rozważenia podziału kadłuba modelu (i prac warsztatowych) na mniejsze elementy. W ten sposób powstała pierwsza wersja projektu.
Początkowo przyjęliśmy do realizacji technologię mieszaną. W pierwszym prototypie części dziobowe i rufowe miały być drukowane na drukarce 3D z najbardziej wytrzymałego na przewidywane warunki materiału, jaki udało nam się znaleźć (akrylonitryl-styren-akrylan - w skrócie: ASA).


Docelowo, po zweryfikowaniu koncepcji, dla szybszej realizacji kolejnych kadłubów, zakładaliśmy również wykorzystanie wydruków jako kopyt do stworzenia form do laminowania. Moduły środkowe (długości 50 lub 100 cm) miały być natomiast klejone z płyt plastikowych - z czym najszybciej poradził sobie nasz prawdziwy pilot i spec technologii tworzyw sztucznych - Krzysztof Szmit (znany Czytelnikom "Na warsztacie" m.in. jako współtwórca park-flyera DeproPrero (MT 10/2007) czy zdalnie sterowanego hammera-amfibii RC (MT 7/2008).


Projekt 3D nowego modelu do druku opracował kol. red. Bartłomiej Jakobsche (cykl jego artykułów, wprowadzających w trójwymiarowe e-projekty, znajdziecie w wydaniach 9/2018-2/2020 "Młodego Technika"). Wkrótce rozpoczęliśmy druk pierwszych elementów kadłuba - ale tu zaczęły się też pierwsze schody… Odpowiednio precyzyjny druk trwał dwuznacznie dłużej, niż się spodziewaliśmy, do tego przydarzyły się kosztowne usterki, wynikające z zastosowania znacznie mocniejszego niż zwykle materiału…


Przy zatrważająco szybko zbliżającym się terminie odbioru podjęliśmy decyzję o rezygnacji z budowy modułowej i druku 3D na rzecz solidnej i lepiej poznanej technologii laminatowej - i rozpoczęliśmy równoległe prace w dwóch zespołach nad różnymi rodzajami szablonów pozytywowych (kopyt) kadłuba: tradycyjnej (konstrukcyjno-sklejkowej) i piankowej (z użyciem dużej frezarki CNC). W tym wyścigu pewną przewagę zdobyła "ekipa nowych technologii" pod kierunkiem Rafała Kowalczyka (notabene multimedalisty krajowych i światowych konkursów dla projektantów modeli RC - w tym m.in. współtwórcy opisanego "Na warsztacie" 6/2018, mistrzowskiego jachtu Opałek FOOTY Racing).

Dalsze prace warsztatowe podążyły zatem za Rafałem trzecią ścieżką projektową: począwszy od stworzenia form pozytywowych, następnie negatywowych - przez odbitki kadłubów epoksydowo-szklanych - aż do gotowych platform USV (Unmanned Surface Vessel): najpierw w pełni wyposażonej prototypowej, a później kolejnych, jeszcze doskonalszych egzemplarzy pierwszej serii. Tu dostosowane do tej technologii zostały kształt i detale kadłuba - wkrótce też trzecia wersja projektu otrzymała od swojego lidera unikalną nazwę własną.


Gerris USV - czyli rześki, roboczy maluch (i do tego z własnym rozumkiem!)
Gerris to łacińska nazwa rodzajowa nartników - znanych chyba wszystkim owadów, pewnie śmigających po wodzie na szeroko rozstawionych kończynach.
Kadłuby docelowego hydrodronu zostały wykonane z wielowarstwowego laminatu szklano-epoksydowego - wystarczająco wytrzymałego do trudnych, piaszczysto- żwirowych warunków przewidywanej pracy. Połączyła je dająca się szybko demontować aluminiowa rama z przesuwnymi (dla ułatwienia ustawienia zanurzenia) belkami do mocowania urządzeń pomiarowych (echosondy, GPS, komputera pokładowego, itp.). Dodatkowym ułatwieniem w transporcie i użytkowaniu są schowane w obrysie kadłubów napędy (po dwa na pływak). Zdublowane silniki to też mniejsze śruby napędowe i większa niezawodność, a jednocześnie możliwość użycia wciąż bardziej modelarskich niż przemysłowych silników.

W kolejnych wersjach testowaliśmy różne układy napędowe, stopniowo zwiększając ich sprawność i moc - stąd kolejne wersje platformy (w odróżnieniu od pierwszego katamaranu sprzed lat) z bezpiecznym zapasem prędkości radzą sobie także z nurtem każdej polskiej rzeki.


Ponieważ jednostka jest w założeniu przeznaczona do pracy od 4 do 8 godzin bez przerwy, do jej ożywienia posłużyły baterie litowo-jonowe o pojemności 34,8 Ah (lub 70 Ah w kolejnej opcji) - po jednej w każdym z kadłubów. Przy tak długim czasie pracy oczywistą rzeczą jest konieczność chłodzenia trójfazowych silników i ich regulatorów. Odbywa się to za pomocą typowo modelarskiego obiegu wody, pobieranej zza śrub napędowych (dodatkowa pompa wodna okazała się zbędna). Kolejnym z zabezpieczeń przed ew. awarią, spowodowaną temperaturą wewnątrz pływaków, jest telemetryczny odczyt parametrów na konsoli sterowniczej operatora (czyli typowego już dziś modelarskiego nadajnika). Diagnozowane na bieżąco są m.in. obroty silników, ich temperatura, temperatura regulatorów, napięcie baterii zasilających, itp.

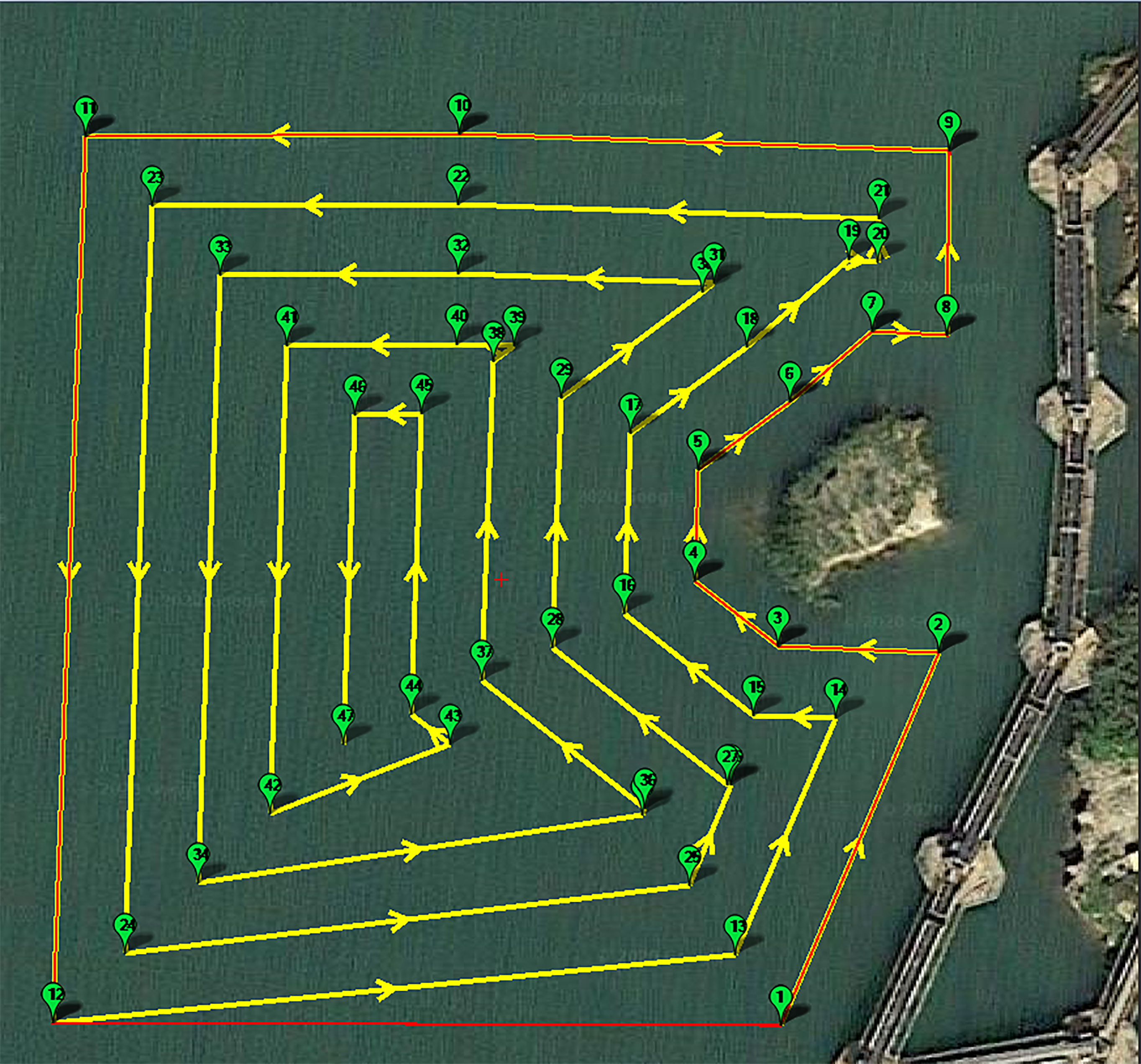
Głównym zadaniem całego zestawu jest pomiar i zapisanie w odrębnym programie geodezyjnym wyników pomiarów głębokości akwenu, służących później do określenia interpolowanej, łącznej pojemności zbiornika (a stąd też np. sprawdzenia ilości wybranego żwiru od ostatniego pomiaru). Pomiary te można prowadzić za pomocą ręcznego sterowania łodzi (identycznie jak w przypadku zwykłego, zdalnie sterowanego modelu pływającego) albo - po przestawieniu jednego przełącznika - całkowicie automatycznie. Wtedy też aktualne odczyty głębokości z echosondy oraz prędkość postępowa, stan misji czy położenie jednostki (z niezwykle precyzyjnego odbiornika GPS RTK, pozycjonowanego do 5 mm) przesyłane są na bieżąco do operatora przez kontroler pixHawk i aplikację sterującą Mission Planner (w niej można również ustalić parametry planowanej misji).
Egzamin praktyczny i wersje rozwojowe
Opisany hydrodron z powodzeniem przeszedł serię testów w różnych, typowo roboczych warunkach i już od ponad roku dobrze służy docelowemu użytkownikowi, pracowicie "orząc" kolejne akweny.
Sukces prototypu oraz uzyskane doświadczenie sprawiły, że rodzą się już kolejne, jeszcze doskonalsze egzemplarze tej jednostki. Uniwersalność platformy daje możliwość użycia jej nie tylko w zastosowaniach geodezyjnych, ale również np. w studenckich projektach i wielu innych zadaniach.
Wierzę, że dzięki udanym rozwiązaniom oraz pracowitości i talentowi kierującego projektem, już wkrótce łodzie Gerris, po przekształceniu w komercyjny projekt, będą mogły stanowić istotną konkurencję dla oferowanych w Polsce rozwiązań amerykańskich, wielokrotnie droższych zarówno w zakupie, jak i serwisowaniu.
Zainteresowanych ew. nieopisanymi tu szczegółami oraz najnowszymi informacjami dotyczącymi rozwoju tej ciekawej konstrukcji serdecznie zapraszam do odwiedzenia strony projektu: GerrisUSV na Facebooku lub tradycyjnie: MODElmaniak.PL.
Wszystkich Czytelników natomiast zachęcam do łączenia talentów dla wspólnego tworzenia innowacyjnych i pożytecznych projektów - nie zważając na (jakże swojskie!) "tu się nic nie opłaca". Wiary we własne możliwości, optymizmu i dobrej współpracy nam wszystkim!
Paweł Dejnak